5. Hybrid model for CSTR 🔆#
![]()
This Notebook was initially prepared by Marcus Wenzel and few modifications have been made by us.
Goals of this exercise 🌟#
We will build a hybrid model for a reactor
We will train the model using sensitivity equations and autodiff
A quick reminder ✅#
Data-driven models are also known as black-box models, or machine learning-based, empirical models. Mechanistic models are also called white-box models, or knowledge-based, first-principles, or phenomenological models. Hybrid, or grey-box models models combine understanding of physical/chemical/biological processes in mechanistic models with modelling unknown phenomena via data-driven approaches [[GVS18, MSMS20, VSOPdA14]].
Hybrid models aim to balance the advantages and disadvantages of mechanistic and data-driven models. Fundamental knowledge introduces structure to data-driven models, so not all interactions have to be learned by the model. ML-based models introduce a statistical element to knowledge-based models, so not all interactions have to be explained by first-principles.
Advantages of hybrid models include: Lower data requirements, improved understanding of the system, and better extrapolation compared to purely data-driven models; higher estimation/prediction accuracy, more efficient model development compared to purely mechanistic models.
First-principles model part for CSTR#
We model a continuous stirred tank reactor (CSTR) with the following liquid-phase reaction: $\( A + B \rightleftarrows X \)$
The reactor is fed by a feed of flowrate \(F_{in}\) and concentrations \(C_{i, in}\) with \(i\) denoting species \(A\), \(B\), and \(X\). The reactor has constant volume \(V\) and is assumed to be perfectly mixed, with an average residence time \(\tau\). The concentrations in the reactor are denoted by \(C_{i}\). A stream with constant flowrate \(F=F_{in}\) exits the reactor:
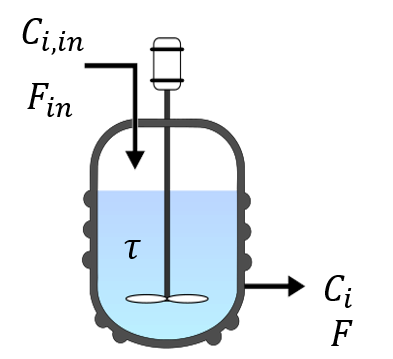
Fig. 6 Schematic representation of the CSTR considered here#
Let’s say we use the following reactor model:
The changes in concentration are a result of material added and withdrawn from the reactor as well as created or consumed by the reaction with stochiometric coefficients \(\nu_i\) and reaction rate \(r\). We assume an average residence time of \(\tau= \frac{V}{F} = 100s\). The inlet concentrations of substance \(i\) into the reactor are given by
For solving the differential equation system, we also need to know the initial concentration of each substance inside the reactor, denoted as \(C_{i,0}\). From the data it is known that the experiment was started with the following initial concentrations:
Time-dependent experimental measurements for all concentrations are available:
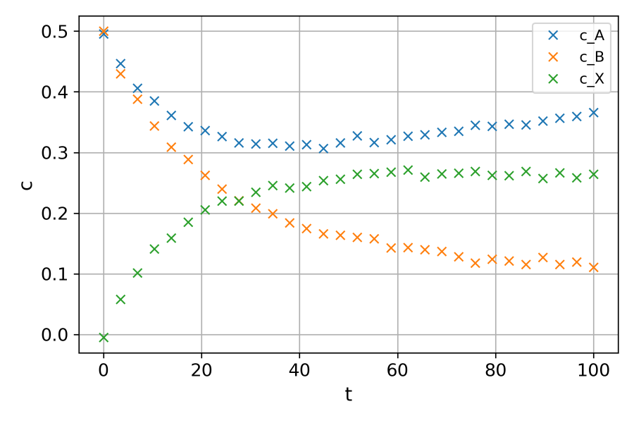
Fig. 7 CSTR measurements of the concentrations.#
The task is to construct a serial hybrid model, in which the reaction rate \(r\) is described by a data-driven model. In this particular example, a neural network will be used.
Serial model construction#
Problem description#
The problem with constructing a serial hybrid model, as exemplified above, is that the data-driven model cannot be trained independently of the differential equation system that describes the system (mechanistic part of the hybrid model). The neural network has to learn the function \(r=f(C)\) but, of course, we do not have values for \(r\) which we could use to train the model. One way to solve this problem is by using sensitivity equations. This approach will be discussed in the following.
Sensitivity equations and solution procedure#
We can describe the differential equation system as follows:
where \(y\) are states of the system, \(u\) are system inputs and \(\phi(y,w)\) denotes a data-driven model that describes a part of the mechanistic model with the use of the states \(y\) and a set of parameter values \(w\). In the case of a neural network, the parameter vector \(w\) includes all the weights and biases.
In order to train any kind of model, we need a loss or cost function (denoted here by \(J\)) to estimate the quality of our model predictions. Often times, the sum of squares of the deviations between the model predictions and the data is used as an objective for parameter estimation:
where \(y\) are the set of model predictions corresponding to the \(N\) measurement points \(y_\text{i,exp}\). The model predictions depend on \(u\) and \(w\), i.e. \(y=f(u,w)\).
Usually, when training a neural network, the gradient of the loss function with respect to the network parameters is used for optimization. The gradient of the loss function with respect to a single parameter \(w_j\) is given by
As can be seen, the gradient depends on \(\frac{\partial y}{\partial w_j}\), i.e. the sensitivities of the system states with respect to the parameters (the weights and biases characterizing the neural network). Training of the neural network is then achieved by iteratively updating the parameters according to
where \(w_j^{n+1}\) is the updated parameter that is calculated from the current parameter \(w_j^{n}\) using the gradient \(\frac{\partial J}{\partial w_j^{n}}\) and a learning rate (step size) \(g\).
The problem could be solved once we have the sensitivities \(\frac{\partial y}{\partial w_j}\). Since the mechanistic part of the model is given by a differential equation system, calculating these sensitivities is a bit more complicated than for an algebraic model. Using local sensitivity analysis of the ODE system and denoting the sensitivities \(\frac{\partial y}{\partial w_j}\) as \(s_j\), the sensitivities can be described by
This equation is a differential equation for the sensitivities. Since \(f\) depends on the system states, the differential equations for the sensitivities need to be integrated simultaneously with the ODE system of the mechanistic part.
Loss function and sensitivity equations for hybrid CSTR model#
For the reactor example above, the loss function is defined as
if we assume that we have measurements for all components at each point \(i\). Then, the gradient of the loss function with respect to the parameters \(w\) is given as
since the concentrations \(C_A\), \(C_B\) and \(C_X\) are all functions of the parameters of the neural network (weights and biases). The sensitivities are calculated by combining the sensitivity equations with the model definition, according to the following ODE system for each parameter \(w_j\), :
Hence, for \(p\) parameters and \(l\) system states, there are \(p*l\) sensitivity equations to be integrated additionally to the \(l\) system equations. If a neural network with 3 input nodes, 10 hidden nodes and 1 output node is used, the total number of parameters is \(3*10+10+10*1+1=51\) parameters for three states (\(C_A\), \(C_B\) and \(C_X\)). Thus, there would be \(3*51=153\) sensitivity equations to be integrated, which quickly becomes computationally intensive.
Differentiation & autograd#
In order to train and run the model, we will need to compute derivates. Automatic differentiation (autodiff) is an algorithm for the fast calculation of accurate derivatives. We will use autograd, the implementation of autodiff in the pytorch package.
Let’s see how it works:
if 'google.colab' in str(get_ipython()):
!pip install autograd
import autograd
import autograd.numpy as np
import matplotlib.pyplot as plt
Let’s define a function and differentiate it with autograd:
def ex_function(x):
y = -1.*x*x*x + 3.*x*x - 10.*x + 4.
#y = np.tanh(x)
return y
ex_deriv = autograd.grad(ex_function)
input = 3.
print("value of the function: " + str(ex_function(input)))
print("value of the derivative: " + str(ex_deriv(input)))
value of the function: -26.0
value of the derivative: -19.0
Note: Autograd required inputs to be float (int will not work!).
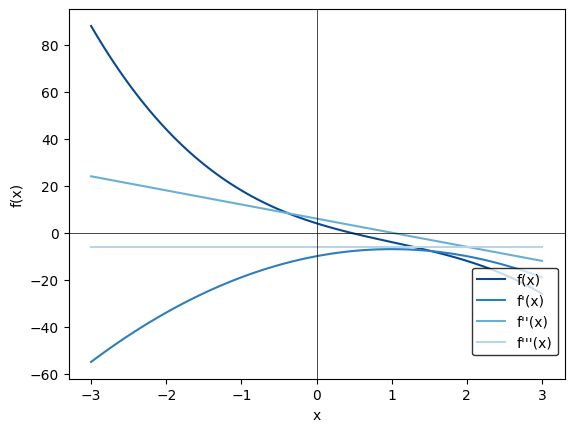
We can show this for ranges:
deriv1 = autograd.grad(ex_function)
deriv2 = autograd.grad(deriv1)
deriv3 = autograd.grad(deriv2)
x = np.linspace(-3,3,100, dtype=float)
y = list()
y1 = list()
y2 = list()
y3 = list()
for i in range(len(x)):
y.append(ex_function(x[i]))
y1.append(deriv1(x[i]))
y2.append(deriv2(x[i]))
y3.append(deriv3(x[i]))
f, ax = plt.subplots(1)
ax.plot(x,y, label = "f(x)", color=plt.get_cmap("Blues")(0.9))
ax.plot(x, y1, label = "f'(x)", color=plt.get_cmap("Blues")(0.7))
ax.plot(x, y2, label = "f''(x)", color=plt.get_cmap("Blues")(0.5))
ax.plot(x, y3, label = "f'''(x)", color=plt.get_cmap("Blues")(0.3))
ax.axhline(0, color="black", linewidth=0.5)
ax.axvline(0, color="black", linewidth=0.5)
#f.legend(loc=(0.75,0.2))
f.legend(loc="center right", bbox_to_anchor=(0.9,0.25), edgecolor="black")
ax.set_xlabel("x")
ax.set_ylabel("f(x)")
Text(0, 0.5, 'f(x)')
Exercise - autograd ❗❗#
Just to practice: implement another function and calculate its derivatives using autograd. Plot them similarly to the above example.
# Your code here
Implementation#
Let’s first import the relevant packages:
from autograd import jacobian
from autograd.misc.optimizers import adam
from autograd.scipy.integrate import odeint
import matplotlib.pyplot as plt
import pandas as pd
import autograd.numpy as np
Now we build the neural network. The first function generates random numbers in the shape needed to initialize the neural network. The second function is handed the parameters describing the network as well as an input, and returns the prediction of the network.
# initialize random number generator for repeatable results
np.random.seed(0)
def init_random_params(layer_sizes, scale):
"""Build a list of weights and biases, one for each layer in the net.
layers is a list with the number of nodes in each layer. Minimum number of layers is three (input, hidden
and output) scale is a constant factor to scale the random values (down or up) if necessary"""
params = []
for idx in range(len(layer_sizes)-1):
weight_mat_elem = layer_sizes[idx]*layer_sizes[idx+1]
bias_vec_elem = layer_sizes[idx+1]
params = np.append(params, np.random.rand(weight_mat_elem+bias_vec_elem))
return params*scale
def neural_net_predict(params, inputs):
"""Implements a (deep) neural network for regression.
params is a list of weights and biases.
inputs is a matrix of input values.
returns network prediction."""
# Make sure that params is a vector
params = params.flatten()
# set separator value for easier indexing of the parameters and assigning them to weights and biases
# for each layer
sep = 0
# loop over all layers
for idx in range(len(layer_sizes)-1):
# calculate weight matrix
W = params[sep:sep+layer_sizes[idx]*layer_sizes[idx+1]].reshape(layer_sizes[idx],layer_sizes[idx+1])
# calculate bias vector
b = params[sep+layer_sizes[idx]*layer_sizes[idx+1]:sep+layer_sizes[idx]*layer_sizes[idx+1]
+layer_sizes[idx+1]]
# set new separator value
sep = layer_sizes[idx]*layer_sizes[idx+1]+layer_sizes[idx+1]
# calculate output as weighted sum of inputs plus bias
outputs = np.dot(inputs, W) + b
# apply activation function and assign the result as the input to the next layer
# (note that this has no effect on the output layer)
inputs = 1/(1 + np.exp(-outputs))
return outputs
Let’s now initialized the model parameters:
# system parameters
tau = 100
# inlet concentrations
c_Ain = 0.7
c_Bin = 0.3
c_Xin = 0
# initial conditions for the concentrations in the reactor
c_A0 = 0.5
c_B0 = 0.5
c_X0 = 0
# end time for integration
t_end = 100
n_samples = 30
t_span = np.linspace(0, t_end, n_samples)
Now we implement the mechanistic part of the model:
# define system equations
def dcdt(c, t, params):
"""Mechanistic part of the hybrid model (ODE system describing the time-dependent
concentrations in the reactor)"""
# disassemble input vector
c_A, c_B, c_X = c
# calculate reaction rates by neural network prediction
r = neural_net_predict(params, c)
#r = 0.08*c_A**0.7*c_B**1.3 # true underlying reaction rate
# system equations
dcdt = [(c_Ain-c_A)/tau - r,
(c_Bin-c_B)/tau - r,
(c_Xin-c_X)/tau + r]
return np.array(dcdt)
Now we use the autograd package to calculate the jacobian with respect to the system states and the parameters, which we’ll need for the sensitivity equations:
# calculate system jacobian and parameter derivatives by automatic differentiation with autograd
dfdc = autograd.jacobian(dcdt, 0) # system jacobian
dfdp = autograd.jacobian(dcdt, 2) # parameter derivatives
We write a function that takes in the system variables \(y\) at time \(t\) and calculates the sensitivities:
# differential equation system
def DiffEqs(y, t, params):
"""Hybrid model including the ODE system for the concentrations as well as the sensitivities
that are used for training the neural network part of the model"""
# disassemble input vector
c = y[:3]
s = y[3:]
# evaluate system jacobian at current point
dfdc_eval = dfdc(c, t, params)
# evaluate parameter derivatives at current point
dfdp_eval = dfdp(c, t, params) # Shape: (3, 1, 16)
# define sensitivities for all parameters
dcdp = np.zeros(len(s)) # preallocate memory for sensitivities
for i in range(len_p): # loop over all parameters to construct the corresponding sensitivity equations
dcdp[i*len_c:(i+1)*len_c] = (dfdc_eval @ s[i*len_c:(i+1)*len_c]).flatten() + dfdp_eval[:,0,i]
# construct sensitivities (see https://docs.sciml.ai/v4.0/analysis/sensitivity.html#Example-solving-an-
# ODELocalSensitivityProblem-1)
# [c1/w1, c2/w1, c3/w1, c1/w2, ...]
return np.concatenate((dcdt(c, t, params).flatten(), dcdp))
For training the network, the following parameters need to be specified:
# Training parameters
scale = 0.0005
num_epochs = 1000
step_size = 0.001
# set neural network size
layer_sizes = [3, 3, 1] # no. of nodes in input layer, hidden layer(s) and output layer
# initialize parameter vector for neural network or load saved parameters
init_params = init_random_params(layer_sizes, scale)
Now we specify the initial value of the variables:
# assemble initial value vector
c0 = [c_A0, c_B0, c_X0]
len_c = len(c0)
len_p = len(init_params)
s0 = np.zeros((len_p*len_c))
y0 = np.concatenate((c0,s0))
Let’s import the training data
if 'google.colab' in str(get_ipython()):
df = pd.read_csv("https://raw.githubusercontent.com/edgarsmdn/MLCE_book/main/references/CSTR_ODE_data.txt", sep=';')
else:
df = pd.read_csv("references/CSTR_ODE_data.txt", sep=';')
c_exp = np.array(df)
The following defines the objective function, also known as loss/risk/error function. First, the model is run, then the difference between experimental data and model prediction is calculated as objective value:
def objective(params, iter):
"""Objective function (sum of squared errors between measurements and model predictions)"""
# calculate hybrid model in forward direction with odeint
sol = odeint(DiffEqs, y0, t_span, args=(params,))
# disassemble results
c_pred = sol[:,:3] # predicted concentrations
return np.trace((c_pred - c_exp).T @ (c_pred - c_exp))
In order to train the model, we require the gradient of the objective with respect to the parameters:
def objective_grad(params, iter):
"""Function calculates the gradient of the objective function with respect to the network parameters"""
sol = odeint(DiffEqs, y0, t_span, args=(params,))
# disassemble results
c_pred = sol[:,:3] # predicted concentrations
sens = sol[:,3:] # sensititvities 16*3=48 -> c1/w1, c2/w1, c3/w1, c1/w2.....
# calculate gradients of the loss function
loss_grad = np.zeros(len_p) # set vector size
for comp_idx in range(len_c):
# For loop is running for each concentration and all parameters
loss_grad += sens[:,comp_idx::3].T @ (c_pred[:,comp_idx] - c_exp[:,comp_idx])
return loss_grad
Finally, the following function allows us to print the status of the model during training:
def summary(params, iter, gradient):
"""Callback function gives informative output during optimization"""
if iter % 10 == 0:
print('step {0:5d}: {1:1.3e}'.format(iter, objective(params, iter)))
np.save('Params', params)
Now let’s train the model with adam! Remember, adam is a gradient descent method with an adaptive learning rate. It uses both the previous gradients (momentum) and their squares (RMSProp) to calculate the next iteration.
Note: the code will take a few minutes to run.
# Optimize the network parameters
optimized_params = adam(objective_grad, init_params, step_size=step_size, num_iters=num_epochs, callback=summary)
step 0: 4.279e+00
step 10: 4.804e-01
step 20: 5.815e-01
step 30: 4.494e-01
step 40: 3.714e-01
step 50: 3.808e-01
step 60: 3.715e-01
step 70: 3.713e-01
step 80: 3.696e-01
step 90: 3.695e-01
step 100: 3.689e-01
step 110: 3.685e-01
step 120: 3.681e-01
step 130: 3.676e-01
step 140: 3.672e-01
step 150: 3.667e-01
step 160: 3.662e-01
step 170: 3.656e-01
step 180: 3.650e-01
step 190: 3.644e-01
step 200: 3.637e-01
step 210: 3.630e-01
step 220: 3.622e-01
step 230: 3.614e-01
step 240: 3.605e-01
step 250: 3.596e-01
step 260: 3.586e-01
step 270: 3.575e-01
step 280: 3.563e-01
step 290: 3.550e-01
step 300: 3.536e-01
step 310: 3.521e-01
step 320: 3.505e-01
step 330: 3.487e-01
step 340: 3.468e-01
step 350: 3.447e-01
step 360: 3.425e-01
step 370: 3.401e-01
step 380: 3.375e-01
step 390: 3.347e-01
step 400: 3.317e-01
step 410: 3.284e-01
step 420: 3.250e-01
step 430: 3.212e-01
step 440: 3.173e-01
step 450: 3.130e-01
step 460: 3.085e-01
step 470: 3.037e-01
step 480: 2.986e-01
step 490: 2.932e-01
step 500: 2.876e-01
step 510: 2.816e-01
step 520: 2.754e-01
step 530: 2.689e-01
step 540: 2.622e-01
step 550: 2.552e-01
step 560: 2.480e-01
step 570: 2.407e-01
step 580: 2.331e-01
step 590: 2.254e-01
step 600: 2.176e-01
step 610: 2.097e-01
step 620: 2.017e-01
step 630: 1.937e-01
step 640: 1.857e-01
step 650: 1.778e-01
step 660: 1.699e-01
step 670: 1.622e-01
step 680: 1.545e-01
step 690: 1.470e-01
step 700: 1.397e-01
step 710: 1.325e-01
step 720: 1.256e-01
step 730: 1.189e-01
step 740: 1.125e-01
step 750: 1.062e-01
step 760: 1.003e-01
step 770: 9.456e-02
step 780: 8.910e-02
step 790: 8.389e-02
step 800: 7.895e-02
step 810: 7.425e-02
step 820: 6.979e-02
step 830: 6.557e-02
step 840: 6.159e-02
step 850: 5.782e-02
step 860: 5.427e-02
step 870: 5.093e-02
step 880: 4.778e-02
step 890: 4.483e-02
step 900: 4.205e-02
step 910: 3.943e-02
step 920: 3.698e-02
step 930: 3.469e-02
step 940: 3.253e-02
step 950: 3.051e-02
step 960: 2.862e-02
step 970: 2.685e-02
step 980: 2.519e-02
step 990: 2.364e-02
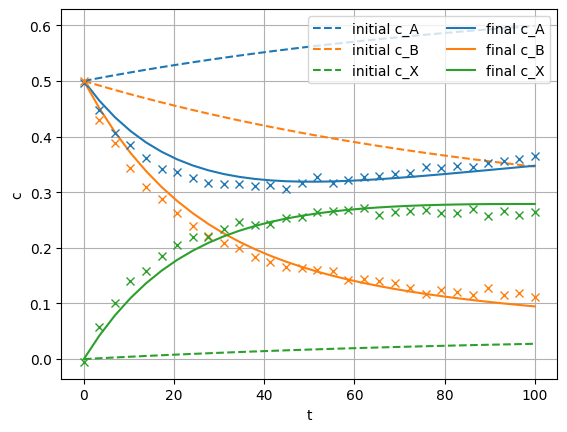
Let’s compare model solutions with the initial parameters vs. the optimized parameters. We need to run the model forward in time, first with the initial parameters, then with the parameters optimized in training:
sol_init = odeint(DiffEqs, y0, t_span, args=(init_params,))
sol_opt = odeint(DiffEqs, y0, t_span, args=(optimized_params,))
Then we plot the trajectories for the three components, for the untrained model vs. the trained model:
# plot system trajectories
plt.figure(1)
plt.plot(t_span, sol_init[:,:len_c],'--')
plt.gca().set_prop_cycle(None)
plt.plot(t_span, sol_opt[:,:len_c])
plt.gca().set_prop_cycle(None)
plt.plot(t_span, c_exp, 'x')
plt.xlabel('t')
plt.ylabel('c')
plt.legend(('initial c_A', 'initial c_B', 'initial c_X',
'final c_A', 'final c_B', 'final c_X'), loc='upper right',ncol=2) # make a legend
plt.grid()
plt.show()
References#
- GVS18
Jarka Glassey and Moritz Von Stosch. Hybrid modeling in process industries. CRC Press, 2018.
- MSMS20
Kevin McBride, Edgar Ivan Sanchez Medina, and Kai Sundmacher. Hybrid semi-parametric modeling in separation processes: a review. Chemie Ingenieur Technik, 92(7):842–855, 2020.
- VSOPdA14
Moritz Von Stosch, Rui Oliveira, Joana Peres, and Sebastião Feyo de Azevedo. Hybrid semi-parametric modeling in process systems engineering: past, present and future. Computers & Chemical Engineering, 60:86–101, 2014.